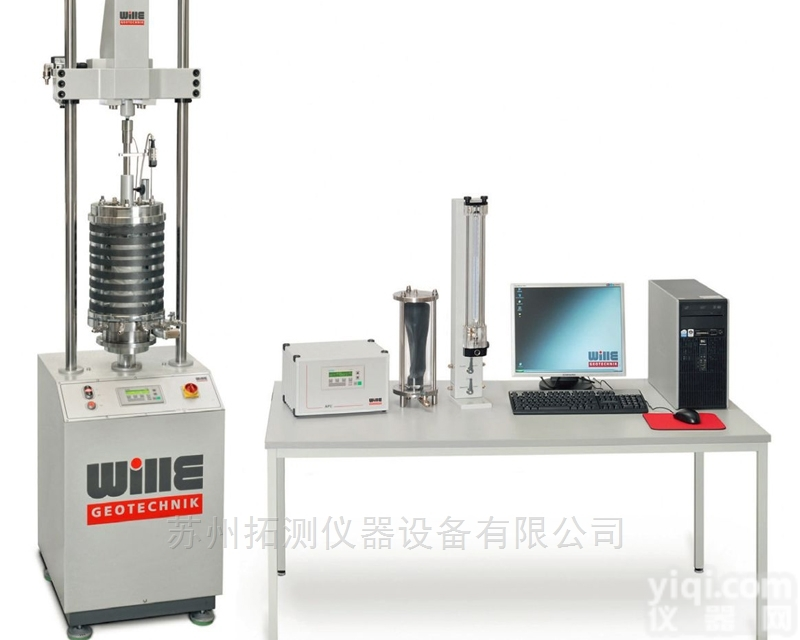
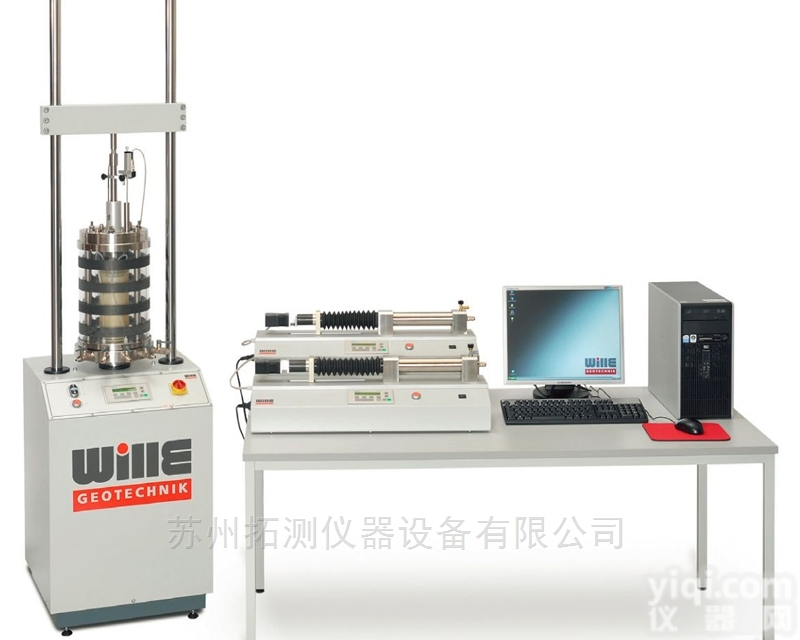
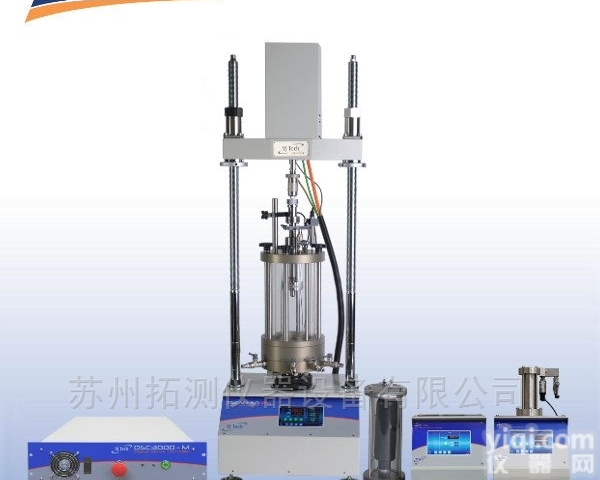
| WF反馈控制循环三轴试验系统对土样施加动荷载。系统为数字控制、伺服气动(闭环)系统,共控制3个参数:轴向应力、围压和反压。 基本系统包括一体化多轴控制与数据采集系统、5kN数字控制作动器、50kN加载架、辅助储气罐(配2个阀门,分别用于控制围压和反压)、2个空气过滤器及配套电缆。标准配置提供循环加载/应力路径试验软件。 系统通过双作用气动作动器施加轴向荷载。循环荷载可以荷载(N)、应力(kPa)、位移(mm)或应变方式(%)施加。数字控制气动阀门施加围压和反压。 通过该系统,除了动态加载之外,还可以完成饱和和不同的应力水平(各向同性、各向异性、K0等)下的固结等试验过程。可以对试样进行单调剪切。软件提供了不同的模块分别完成上述试验过程。 通过配备不同规格的三轴室,系统可以测试多种试样尺寸:直径38、50、70、100和150mm。 WF静动三轴仪可以完成下述试验过程: l 标准三轴试验UU, CU, CD,包括饱和、各向同性和各向异性固结,测量孔压和体变; l 应力和应变路径控制试验,包括K0固结; l 循环加载; l 动态剪切强度和变形; l 液化势; l 剪切模量和阻尼比; l 回弹模量。 l Play-back功能,可以模拟随机地震波 l 可以施加动态侧向压力 主要特性: l K0固结 l 应力路径试验 l 静三轴和动三轴试验 l ±5 kN循环加载(或更高加载,有多种规格可选) l 频率0~20 Hz l 动态围压 l 液化测量 l 模拟自然和人为振动 多轴控制与数据采集系统 IMACS为一体化集成系统,为试验过程和传感器提供严格的控制、定时和数据采集功能。IMACS通过USB接口与PC相连。数据采集模块有13个标准化传感器输入通道(±10 V)。所有通道均通过高速20 bit A/D转换实现数字化,用于数据分析和显示。控制模块有3个通道用于反馈控制,个用于竖向加载作动器,第二个用于围压,第三个用于反压。反馈控制模块和数据采集模块有各自专用的高速USB接口,从而实现无间断同时通讯,提高操作速度及扩展性。通过PC,IMACS自动控制特定试验的加载过程。IMACS直接控制伺服阀施加所需的加载速率和波形、围压和反压。试验过程中,IMACS从传感器捕捉数据并通过USB接口传输到PC进行处理、显示和存储。 技术规格: l 反馈控制通道:3 l 数据采集通道:13 l I/O模块处理器:32 bit RISC l 通讯接口:USB 或 RS 232 l USB接口传输速率:10 Mb/s l RS 232传输速率:115 kb/s l IMACS数据采集速度:达5 kHz l 数据采集分辨率:20 bit l 伺服作动器类型:低摩擦,通杆型 l 伺服加载范围:± 5 kN(或更高) l 伺服作动器频率:可达70 Hz l 围压:1000 kPa l 反压:1000 kPa 气动作动器 该作动器为数字控制,双向(拉伸/压缩)。需要800kPa的压缩空气进行工作。IMACS的信号作用在电压/压力转换器上,对作用于试样上的荷载进行调整。作动器内置位移传感器,可以在荷载控制或位移控制模式下进行试验。 作动器可以产生的频率为70Hz,但该频率与试验的材料有密切关系。软的材料会发生较大的位移,意味着作动器的行程较大;而硬的材料所需荷载相对较大,导致频率降低。但在进行土工试验时,特别是进行液化试验时,这一点不是问题。因为此时作需的荷载和频率均相对较低。作动器的高频性能曲线见下页,曲线显示了在正弦加载条件时给定频率下所能获得的荷载。 主要特点: l ±5kN数字控制; l 设计紧凑,长寿命。低摩擦; l 通杆设计,装配高性能气动伺服阀,工作频率达70Hz; l 配备同轴固定位移传感器。 试验软件 Windows版软件,提供下述功能模块: l ASTM D5311-96:应力控制模式下土样的循环三轴强度标准试验方法; l ASTM D3999-96:测定土的模量和阻尼特性的标准试验方法; l 循环应力试验 标准正弦波、方波、三角波等 l 循环应变试验 标准正弦波、方波、三角波等 l 512点用户自定义波形,每个循环采集100个读数; l Play-back功能 l 液化; l 应力路径: - 增加或降低径向应力; - 增加或降低轴向应力; l 固结: - 比值恒定或变化; - 各向同性; - 各向异性 - K0,增加径向应力1 - K0,增加轴向应力1 l 标准UU、CU、CD三轴试验; l 饱和: - 标准或自动压力增量控制,由使用者输入增量和压力差; - 连续饱和,检测B值; l 单调试验 - 轴向静态压缩试验; - 轴向静态拉伸试验; l 非标准试验 - 无需编程即可试验某些特殊试验过程; l 上述功能的支撑体系有: l 传感器数据库:存储所有传感器的名称和标定编号; l 波形数据库:存储了所有的标准波形如正弦、余弦、方波、三角波等,还可以存储自定义波形; l 试验数据库:存储了试验设置数据,其优势在于将来可以重新调用相同的加载过程。如果初始试验完成之后需要进行验证,可以调用完全一致的试验步骤; l 万能调谐程序:借助于模型试样,可以对系统进行调谐,以获得所需荷载或位移下的可能波形。 说明:K0可以通过径向变形或体变计算。 |